
VBOX 4 IMU INTEGRATION
VBOX 4 seamlessly integrates with VBOX IMU05 to enhance data accuracy and reliability. This means you can reliably test in areas with limited or no satellite coverage, such as tunnels, deep urban canyons and test tracks with heavy tree lining.
Available in standard and advanced S versions, VBOX IMU05 utilises advanced inertial technology to augment the GNSS capabilities of VBOX 4, delivering cleaner, more precise test data.
Precise Position and Movement Analysis
Additionally, VBOX IMU05 adds crucial attitude channels - Yaw, Pitch, and Roll - which are essential for vehicle dynamics and ADAS testing to analyse lateral and longitudinal movements, including Slip Angle and Vehicle/Body Heading.
Used as an Inertial Navigation System (INS) the IMU05 will produce pitch and roll angles accurate to 0.02° RMS (0.013° RMS for IMU05-S), yaw angles accurate to 0.1° RMS (0.07° RMS for IMU05-S) and smoother velocity data.
Translate Reference Point
VBOX IMU05 adds the ability to translate measurements away from the GNSS antenna, to any location on the vehicle, such as the centre of gravity or centre of rotation. This allows for analysis at the point of interest rather than only at the vehicle roof, which experiences measurement overshoot during dynamic manoeuvrers.
Mitigate GNSS Multipath
The combined use of VBOX 4 and IMU05 excels in environments with poor GNSS signals, such as areas prone to signal occlusion, denial, or multi-path interference. Here, the IMU05 consistently maintains data accuracy for speed and position, even when GNSS data is compromised.
IMU INTEGRATION
Survey-grade high-speed GPS/GNSS is the most accurate way to measure velocity - as long as view to the sky is clear.
Challenges occur when buildings or tall trees obstruct the testing ground, causing GNSS signal interruptions and resulting in data dropouts and spikes, which compromise the cleanliness of the velocity signal.
To maintain high GNSS precision even with limited sky visibility, we integrate data from an Inertial Measurement Unit (IMU) with the VBOX data logger.
By blending GNSS with IMU data, which includes three gyros and three accelerometers, we produce smoother and more reliable data. This integration effectively handles GPS dropouts, ensuring consistent accuracy. The IMU integration allows VBOX to achieve high precision even in compromised external conditions, making the data more reliable and easier to interpret.

Brake Testing using IMU Integration
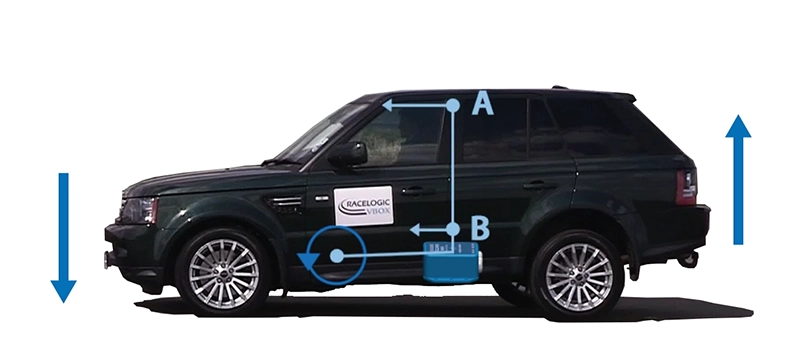
Point A has travelled further than point B.
Conducting brake tests on tall vehicles with long suspension travel can result in a speed overshoot of the velocity data, due to the measurements being taken at the high roof position of the GPS antenna. As the brakes are initially applied, there is a higher rate of change in velocity at the roof than there is at the vehicle's centre of gravity (COG).
However, the integration of an IMU with a suitably upgraded VBOX 3i or VBOX 4 can be used to counteract this 'lever-arm' effect by placing the IMU at the COG, which measures the vehicle pitch as it brakes. This data, when combined with that from GPS, provides a compensation for the overshoot and allows for consistent brake stop testing.
Counteracting the lever-arm effect will also aid test engineers when conducting high-dynamic manoeuvres other than brake stops. In slip angle measurements, the speed overshoot can occur if the antenna is moving through a greater arc of travel than that of the vehicle's centre of gravity as it corners. Procedures such as lane change manoeuvres can therefore benefit from IMU integration and lever-arm compensation.
This graph shows how point A has travelled further than point B.
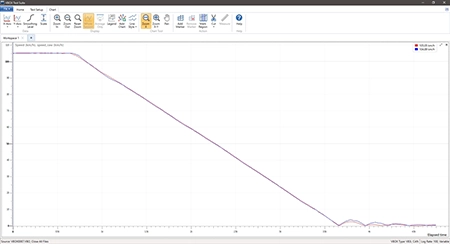
Blue trace = GPS Speed; Red trace = IMU-corrected data
In this example of a high-dynamic brake stop, the blue trace (GPS Speed) overshoots at the initial point of brake application, and then exhibits a damped oscillation as the deceleration continues. The IMU-corrected data (red trace) accurately records the brake stop from the vehicles centre of gravity.
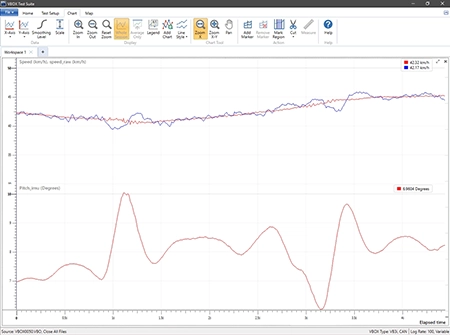
Red (below) = Pitch measured by the IMU; Blue = GPS speed; Red = IMU integrated GPS speed
The traces are of a car going over a speed hump. Note how the GPS speed alters as the vehicle roof moves independently of the COG as it goes over the hump. The integrated speed logs the correct speed of the vehicle.