
INERTIAL MEASUREMENT UNIT (IMU04) - FEATURES
Improving GPS
Using the latest multi-frequency, multi-constellation GNSS receivers and integrating inertial and vehicle speed data is making up for the limitations of the test track.

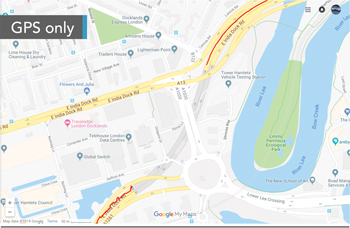
ABOVE: Multifrequency GNSS retains 2cm positional accuracy even in built-up urban areas
It can be exciting and also daunting working in an industry where technological progress seems to be increasing at an exponential rate. New techniques and faster ways of obtaining better results seem to be coming thick and fast. One such example of explosive growth is in global navigation satellite systems (GNSS), an area that we can no longer refer to as GPS, given that there are now four major constellations contributing to a more accurate and reliable navigation solution.
Galileo, the latest EU component in this infrastructure, has been a long time coming, but it looks like it was worth the wait. The Galileo program has benefited from improvements in satellite ranging techniques since GPS first came on the scene, with stronger, more robust signals improving reception and providing higher fidelity.

Rapid advancement in microprocessor power has enabled receivers to handle multiple constellations on several frequencies at high update rates, while processing inertial sensors and using vehicle wheel speed data. The key to the improved tracking and accuracy is not just down to the number and quality of the signals now present, but also to the availability of multiple frequencies.
All GNSS satellites now transmit on more than one frequency, enabling elimination of the errors caused by ionospheric effects (one of the major sources of positional error) by simultaneously processing at least two range measurements.
For the automotive test engineer, GNSS measurement of speed, position and acceleration has become an essential part of the process in assessing the performance of many aspects of a vehicle. Test tracks are rarely perfect places for satellite reception, with trees, bridges and tunnels all having an effect on the quality of the measured data.
When the tests are carried out on the road, this problem becomes even greater, with more objects obscuring the direct view to the satellites. However, this limitation is rapidly disappearing, brought about by using the latest multi-frequency, multi-constellation GNSS receivers and integrating inertial and vehicle speed data.
As an example of the extraordinary precision that can now be obtained in places where you would previously struggle to get any satellite lock at all, Racelogic carried out a test down a very narrow street, with buildings on either side and an overhanging roof. By using multiple frequencies on the GPS, GLONASS, Beidou and Galileo constellations, an astounding accuracy of 2cm (0.8in) was obtained without using any other sensors.
The vehicle path was so accurate that testers could clearly see on which side of the road the car was traveling, and the measured path follows almost the same line on both passes.
This accuracy was obtained through a combination of tracking up to 26 satellites and using two frequencies on each of the four constellations.

An added advantage of using multi-frequency techniques is the time taken to recover centimeter-level accuracy after a bridge or tunnel is often less than two seconds. Furthermore, in areas where there is no view of the sky at all, such as in tunnels, inertial sensors and wheel speeds can fill in the gaps for periods of up to five minutes.
Racelogic carried out a test in the 400m-long (1,312ft) East India Dock Tunnel in London.

The resulting data clearly showed the difference that the inertial and wheel speed data is making to the accuracy of the estimated trajectory, with the inertial measurement unit (IMU) doing a good job of estimating the position in the tunnel, ending up with a 15m (49ft) error at the end.Adding the wheel speeds into the system considerably reduces the errors, tracking the vehicle through the tunnel with great accuracy.

The wheel speed information certainly makes a huge difference to the data when there is no visibility of satellites, so the question is, how do you obtain this data from the vehicle in the first place?
You could fit external wheel speed sensors to the vehicle, preferably one on either rear wheel, but they are expensive, difficult to fit and vulnerable to damage.
The best solution is to use the sensors already fitted to the vehicle by connecting to the CAN bus.
Over the past 20 years, Racelogic has built a comprehensive database of CAN protocols, enabling customers to connect directly to the vehicle’s bus and to use the wheel speed information, drastically improving the measurement accuracy in difficult conditions.
Racelogic’s new VB3iS product has the latest multi-constellation, multi-frequency GNSS engine, with an internal, high-grade IMU and the ability to use CAN wheel speed information. With all these tricks up its sleeve, the VB3iS achieves centimeter-level precision in environments previously off-limits to GPS-based systems. The VB3iS is designed for ADAS testing, steering robots and autonomous testing.
|
|
